Tongkat
Tunanetra Modern
1. Tujuan[kembali]
- Mengetahui perihal sensor ultrasonic
dan sensor pir
- Mengetahui prinsip kerja dari
sensor ultrasonic dan sensor pir
- Dapat mensimulasikan rangkaian
sensor ultrasonic dan sensor pir
2. Alat dan Bahan[kembali]
1.
DC Voltmeter

Alat ukur yang biasa digunakan untuk
mengukur besar tegangan listrik yang ada dalam sebuah rangkaian listrik.
2.
Power Suplay DC

Berfungsi
untuk mensuplai tegangan DC pada rangkaian.
B. Bahan
1.
Sensor Ultrasonik
Sensor HC-SR04 memiliki spesifikasi
sebagai berikut :
Tegangan
: 5V DC
Arus
statis : < 2mA
Level
output : 5v – 0V
Sudut
sensor : < 15 derajat
Jarak
yg bisa dideteksi : 2cm – 450cm (4.5m)
Tingkat
keakuratan : up to 0.3cm (3mm)

2.
Sensor PIR

Spesifikasi
:
- Voltage : 5V – 20V
- Power consumption : 65mA
- TTL output : 3.3V, 0V
- Delay time : adjustable
(.3->5min)
- Lock time : 0.2 sec
- Trigger method : L – disable
repeat trigger, H – enable repeat trigger
- up to 20 feet (6 meters) 110°
x 70° detection range
- Temperature : -15 ~ +70
- Dimension : 32*24 mm, distance
between screw 28mm, M2, Lens dimension in diameter: 23mm
3.
Resistor


4.
Resistor Variabel / Potensiometer


5.
Transistor NPN

- Type - NPN
- Collector-Emitter Voltage: 35
V
- Collector-Base Voltage: 35 V
- Emitter-Base Voltage: 5 V
- Collector Current: 2.5 A
- Collector Dissipation - 10 W
- DC Current Gain (hfe) - 100 to
200
- Transition Frequency - 160 MHz
- Operating and Storage Junction
Temperature Range -55 to +150 °C
- Package - TO-126

6.
IC Op-Amp

Konfigurasi
PIN :
- Pin-1 dan pin-8 adalah o / p
dari komparator
- Pin-2 dan pin-6 adalah
pembalik i / id
- Pin-3 dan pin-5 adalah non
inverting i / id
- Pin-4 adalah terminal GND
- Pin-8 adalah VCC +
Spesifikasi
:
- Gain tegangan besar adalah 100
dB
- Lebar pita lebar adalah 1MHz
- Jangkauan pasokan listrik yang
luas termasuk pasokan listrik tunggal dan ganda
- Rentang catu daya tunggal
adalah dari 3V ke 32V
- Jangkauan pasokan listrik
ganda adalah dari + atau -1.5V ke + atau -16V
- Penyaluran arus pasokan sangat
rendah, yaitu 500 μA
- 2mV tegangan rendah i / p
offset
- Mode umum rentang tegangan i /
p terdiri dari ground
- Tegangan catu daya dan
diferensial i / p tegangan serupa ayunan tegangan o / p besar.
7.
Relay

Konfigurasi
pin :


8.
Dioda

Fitur:
- Arus maju rata-rata 1A
- Arus puncak non-repetitif 30A
- Arus balik 5uA
- Tegangan balik RMS 35V
- Tegangan balik repetitif 50V
9.
Motor

Konfigurasi pin :

Pin
1 : Terminal 1
Pin
2 : Terminal 2
Spesifikasi Motor DC

10.
Buzzer

Spesifikasi
:
-
Tegangan Kerja : 9 -15 VDC
-
Tegangan Karakteristik : 12 VDC
-
Arus maksimal : 40 mA
-
Frekuensi : 2.8 Khz
-
Kenyaringan Minimal : 85 dBa
-
Seri : KIB-18
3. Dasar Teori[kembali]
1)
DC Voltmeter

Sebuah voltmeter DC mengukur beda
potensial antara dua titik dalam sebuah rangkaian DC kemudian dihubungkan
paralel dengan sebuah sumber tegangan atau komponen rangkaian.
2)
Power Supplay DC
![]()
Fungsi power supply adalah untuk
mengalirkan dan mengatur daya/energi untuk di suplai ke beban dalam hal ini
biasanya komponen elektronika.
3)
Sensor Ultrasonik

Sensor
Ultrasonik adalah sensor untuk mengubah suara (gelombang ultrasonik)
menjadi arus listrik dan sebaliknya. Gelombang ultrasonik dibangkitkan melalui
piezoelektrik yang pada umumnya berfrekuensi 40kHz. Prinsip kerjanya yaitu
dengan mengirimkan (suara) gelombang ultrasonik dengan frekuensi tertentu ke
depan oleh Trigger (pengirim sinyal suara). Lalu, ketika ada objek yang
melewati gelombang tersebut, maka suara tersebut akan terpantul dan kembali ke
Echo (penerima sinyal suara). Kemudian, sensor akan menghitung selisih waktu
ketika sinyal dikirim dengan waktu ketika sinyal kembali.

Pemilihan HC-SR04 sebagai sensor jarak
yang akan digunakan pada alat ini karena memiliki fitur sebagai berikut;
kinerja yang stabil, pengukuran jarak yang akurat dengan ketelitian 0,3 cm,
pengukuran maksimum dapat mencapai 4 meter dengan jarak minimum 2 cm, ukuran
yang ringkas dan dapat beroperasi pada level tegangan TTL. Timing diagram
pengoperasian sensor ultrasonik HC-SR04 diperlihatkan pada Gambar.

Sensor ultrasonik terdiri dari dari dua
unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan
penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan
mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan
bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat
logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat),
mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini
disebut dengan efek piezoelectric.
- Pemancar
Ultrasonik (Transmitter)
![]()
Prinsip kerja dari
rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
·
Sinyal 40 kHz dibangkitkan melalui
mikrokontroler.
·
Sinyal tersebut dilewatkan pada sebuah
resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju
rangkaian dioda dan transistor.
·
Kemudian sinyal tersebut dimasukkan ke
rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah
transistor.
·
Ketika sinyal dari masukan berlogika
tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut
akan membias transistor T1, sehingga arus yang akan mengalir pada kolektotr T1
akan besar sesuai dari penguatan dari transistor.
·
Ketika sinyal dari masukan berlogika
tinggi (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut
akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2
akan besar sesuai dari penguatan dari transistor.
·
Resistor R4 dan R6 berfungsi untuk
membagi tengangan menjadi 2,5 V. Sehingga pemancar ultrasonik akan menerima
tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d - 2,5 V).
- Penerima
Ultrasonik (Receiver)
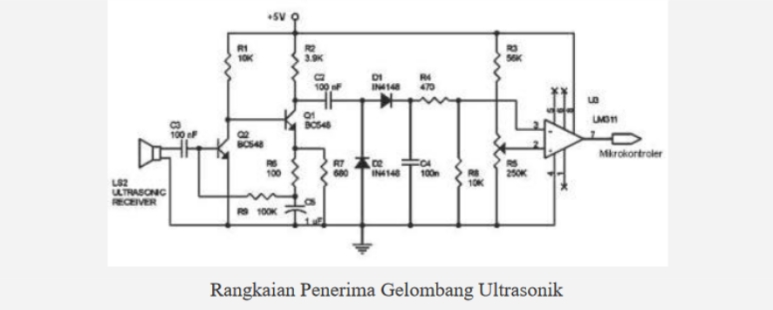
Prinsip kerja rangkaian
pemancar gelombang ultrasonik tersebut adalah sebagai berikut:
·
Pertama – tama sinyal yang diterima akan
dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
·
Kemudian sinyal tersebut akan di filter
menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian
transistor Q1.
·
Setelah sinyal tersebut dikuatkan dan di
filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian dioda D1 dan
D2.
·
Kemudian sinyal tersebut melalui
rangkaian filter low pass filter pada frekuensi < 40kHz melalui rangkaian
filter C4 dan R4.
·
Setelah itu sinyal akan melalui
komparator Op-Amp pada U3.
·
Jadi ketika ada sinyal ultrasonik yang
masuk ke rangkaian, maka pada komparator akan mengeluarkan logika rendah (0V)
yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
4)
Sensor PIR

Sensor PIR (Passive Infra Red) adalah
sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah.
Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra
merah tetapi hanya menerima radiasi sinar infra merah dari luar.
Sensor ini biasanya digunakan dalam
perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan
energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan
suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan
suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran
infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan
maka akan terjadi perubahan pembacaan pada sensor.
Sensor PIR terdiri dari beberapa bagian yaitu
:
a.
Fresnel Lens
Lensa Fresnel pertama kali digunakan pada
tahun 1980an. Digunakan sebagai lensa yang memfokuskan sinar pada lampu
mercusuar. Penggunaan paling luas pada lensa Fresnel adalah pada lampu depan
mobil, di mana mereka membiarkan berkas parallel secara kasar dari pemantul
parabola dibentuk untuk memenuhi persyaratan pola sorotan utama. Namun kini,
lensa Fresnel pada mobil telah ditiadakan diganti dengan lensa plain
polikarbonat. Lensa Fresnel juga berguna dalam pembuatan film, tidak hanya
karena kemampuannya untuk memfokuskan sinar terang, tetapi juga karena
intensitas cahaya yang relative konstan diseluruh lebar berkas cahaya.
b.
IR Filter
IR Filter dimodul sensor PIR ini mampu
menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14 mikrometer,
sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar
antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor.
Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
c.
Pyroelectric Sensor
Seperti tubuh manusia yang memiliki suhu
tubuh kira-kira 32 derajat celcius, yang merupakan suhu panas yang khas yang
terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian
ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini
sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida,
caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa
menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa
energi panas. Material pyroelectric bereaksi menghasilkan arus listrik karena
adanya energi panas yang dibawa oleh infrared pasif tersebut. Prosesnya hampir
sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar
cell.
d.
Amplifier
Sebuah sirkuit amplifier yang ada
menguatkan arus yang masuk pada material pyroelectric.
e.
Komparator
Setelah dikuatkan oleh amplifier kemudian
arus dibandingkan oleh komparator sehingga mengahasilkan output.

Gambar 4. Diagram block PIR
Grafik
respon
a.
Respon terhadap arah, jarak, dan kecepatan

Pada grafik tersebut ; (a) Arah yang
berbeda mengasilkan tegangan yang bermuatan berbeda ; (b) Semakin dekat jarak
objek terhadap sensor PIR, maka semakin besar tegangan output yang dihasilkan ;
(c) Semakin cepat objek bergerak, maka semakin cepat terdeteksi oleh sensor PIR
karena infrared yang ditimbulkan dengan lebih cepat oleh objek semakin mudah
dideteksi oleh PIR, namun semakin sedikit juga waktu yang dibutuhkan karena
sudah diluar jangkauan sensor PIR.
b.
Respon terhadap suhu

Dari grafik, didapatkan bahwa suhu juga
mempengaruhi seberapa jauh PIR dapat mendeteksi adanya infrared dimana semakin
tinggi suhu disekitar maka semakin pendek jarak yang bisa diukur oleh PIR.
5)
Resistor

Resistor merupakan salah satu komponen yang digunakan dalam sebuah sirkuit atau rangkaian elektronik. Resistor berfungsi sebagai resistansi/ hambatan yang mampu mengatur atau mengendalikan tegangan dan arus listrik rangkaian. Resistor mempunyai nilai resistansi (tahanan) tertentu yang dapat memproduksi tegangan listrik di antara kedua pin dimana nilai tegangan terhadap resistansi tersebut berbanding lurus dengan arus yang mengalir, berdasarkan persamaan hukum Ohm :

Penjelasan
pita sensor

6)
Resistor Variabel / Potensiometer

Berfungsi
untuk mengatur besar tahan sesuai keperluan.
7)
Transistor NPN BC547


NPN artinya tipe transistor yang
bekerja atau mengalirkan arus negatif dengan positif sebagai biasnya.
Transistor NPN mengalirkan arus negatif dari kaki emitor ke kolektor. Emitor
berperan sebagai input dan kolektor berperan sebagai output apabila transistor
diberikan arus positif pada basisnya.
- Emitor (E) memiliki fungsi
untuk menghasilkan elektron atau muatan negatif.
- Kolektor (C) berperan sebagai
saluran bagi muatan negatif untuk keluar dari dalam transistor.
- Basis (B) berguna untuk
mengatur arah gerak muatan negatif yang keluar dari transistor melalui
kolektor.
8)
IC Op-Amp LM358

Berfungsi
sebagai penguat atau pembanding tegangan input dengan output.
Karakteristik
IC OpAmp
- Penguatan Tegangan Open-loop
atau Av = ∞ (tak terhingga)
- Tegangan Offset Keluaran
(Output Offset Voltage) atau Voo = 0 (nol)
- Impedansi Masukan (Input
Impedance) atau Zin= ∞ (tak terhingga)
- Impedansi Output (Output
Impedance ) atau Zout = 0 (nol)
- Lebar Pita (Bandwidth) atau BW
= ∞ (tak terhingga)
- Waktu tanggapan (respon time)
= 0 detik
- Karakteristik tidak berubah
dengan suhu
Bentuk
gelombang :

Non Inverting


Komparator


Rangkaian
One shot Multivibrator adalah rangkaian astable multivibrator yang mempunyai
satu kondisi stabil dan akan kembali ke kondisi stabil kembali sesudah
ditriger. Rangkaian One shot Multivibrator merupakan rangkaian astable
multivibrator dengan ditambahkan rangkaian triger yang terhubung ke kaki non
inverting seperti gambar 15. Untuk membuat kondisi output VO menjadi tidak
stabil dapat diberikan sinyal input trigger positif maupun negatif sesuai
rancangan seperti gambar 16.

Gambar 15 rangkaian One shot Multivibrator
Dari gambar 15 dapat dijelaskan bahwa pada saat keadaan steady state Vi = 0, Vo = +Vsat sehingga,

maka kapasitor C mengisi (charge) dari VO melalui R3, D2, dan C ke ground.
Tegangan kapasitor VC < VLT karena
Vcmax = VD = 0,7 Volt.

Gambar 16 : Bentung gelombang tegangan input trigger, tegangan kapasitor VC dan tegangan output Vo (comparator).
Ketika
diberi trigger Vi yang besarnya Vip =2 (–VLT) (supaya bekerja baik)
maka VO berubah dari +Vsat menjadi –Vsat sehingga C discharge atau arus
discharge dari kapasitor C melalui D1 dan R4 ke output op-amp VO =
-Vsat, sehingga :

Pada input non inverting akan berharga minus dari penjumlahan tegangan Vip = 2 (–VLT) dengan VUT maka dihasilkan harga sama dengan VLT sehingga bila dibandingkan dengan input inverting sebesar Vd akan membuat output VO berubah dari +Vsat menjadi –Vsat dan Vref berubah menjadi sebesar VLT.
Kapasitor C mengalami discharge sampai VC £ VLT maka tegangan output VO berubah dari -Vsat menjadi +Vsat dan Vref berubah menjadi sebesar VUT .
Untuk membuat waktu kapasitor C saat charge (tC) lebih kecil adalah dengan memasang R yang lebih kecil. Misalkan R3=0,1 R4 maka tr (recovery time) = 0,1 t.

Gambar
17 Rangkaian simulasi dan bentuk gelombang input dan output
9)
Relay

Relay menggunakan
Prinsip Elektromagnetik untuk menggerakkan Kontak Saklar sehingga dengan arus
listrik yang kecil (low power) dapat menghantarkan listrik yang
bertegangan lebih tinggi.
10)
Dioda


Dioda
(Diode) adalah komponen elektronika aktif yang terbuat dari bahan
semikonduktor dan digunakan untuk menghantarkan arus listrik ke satu arah
tetapi menghambat arus listrik dari arah sebaliknya.
11)
Motor

Motor Listrik atau
Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi
kinetik atau gerakan (motion).
12)
Buzzer

Buzzer adalah
perangkat elektronika yang terbuat dari elemen piezoceramics pada suatu
diafragma yang mengubah getaran/vibrasimenjadigelombang suara. Buzzer
menggunakan resonansi untukmemperkuatintensitas suara. Buzzer atau beeper
memiliki 2tipe :Resonator sederhana yang disuplai sumber AC dan melibatkan
transistorsebagai micro-oscillator yang membutuhkan sumber DC.
Kapasitor
[C] gambaran sederhananya terdiri dari dua keping sejajar yang memiliki luasan
[A] dan dipisahkan dengan jarak yang sempit sejauh [d]. Seringkali kedua keping
tersebut digulung menjadi silinder dengan sebuah insulator atau kertas sebagai
pemisah kedua keping. Pada gambar rangkaian listrik, simbolnya dinotasikan
dengan :
Berbagai tipe kapasitor, (kiri)
keping sejajar, (tengah) silindris, (kanan) gambar beberapa contoh asli yang
digunakan pada peralatan elektronik.

[Sumber:
Douglas C. Giancoli, 2005]
Dapat mencari nilai kapasitas atau
kapasitansi suatu kapasitor, yakni jumlah muatan listrik yang tersimpan. Untuk
bentuk paling umum yaitu keping sejajar, persamaan kapasitansi dinotasikan
dengan:
Dimana:
C = kapasitansi (F, Farad) (1 Farad = 1 Coulomb/Volt)
Q = muatan listrik (Coulomb)
V = beda potensial (Volt)
Nilai
kapasitansi tidak selalu bergantung pada nilai Q dan V. Besar nilai
kapasitansi bergantung pada ukuran, bentuk dan posisi kedua keping serta jenis
material pemisahnya (insulator). Nilai usaha dapat berupa positif atau negatif
tergantung arah gaya terhadap perpindahannya. Untuk jenis keping sejajar dimana
keping sejajar memiliki luasan [A] dan dipisahkan dengan jarak [d], dapat
dinotasikan dengan rumus:
4. Percobaan[kembali]
A. Prosedur Percobaan[kembali]
- Pahami datasheet setiap
komponen/bahan sebelum membuat rangkaian.
- Persiapkan alat dan bahan yang
dibutuhkan.
- Buatlah rangkaian seperti yang
ada pada gambar rangkaian simulasi.
- Cobalah mensimulasikan
rangkaian yang dibuat hingga rangkaian tersebut bisa berjalan tanpa error.
B. Rangkaian Simulasi[kembali]

a.
Sensor Ultrasonik ON

Pada saat sensor ultrasonik berlogika 1
transistor yang terhubung pada kaki trigger pada sensor ultrasonik akan menyala
yang menandakan bahwa adanya suatu benda yang menghalangi sensor. Lalu setelah
diterima oleh sensor ultrasonik maka tegangan akan dikeluarkan di kaki echo dan
diperkuat oleh op-amp (amplifier non inverting) lalu tegangan yang dikeluarkan
dari op-amp masuk ke kaki basis pada transistor. Karena besar tegangan
transistor >0,7 volt maka transistor aktif. Maka kaki kolektor
mendapat tegangan pada power supply dan tegangan pada kaki emitor akan
diteruskan ke ground. Transistor aktif maka relay pun juga aktif. Arus dari
power supplay pada relay diteruskan buzzer, dan buzzer aktif (berbunyi) lalu
diteruskan ke ground.
b.
Sensor PIR ON

Ketika sensor PIR mendeteksi adanya
cahaya infrared atau keberadaan manusia pada jarak tertentu (logika 1) maka tegangan yang dikeluarkan
sensor akan diteruskan ke R8 dan R4, dari R8 akan menuju ground dan dari R4
akan diteruskan ke transistor Q1. Karena tegangan pada transistor > 0,7 Volt
maka transistor aktif. Arus dari supplay akan masuk ke R17 lalu masuk ke kaki
koltektor Q1 dan keluar dari kaki emitter Q1 menuju ground. Arus dari supplay
akan diteruskan ke RV3 dan menuju op-amp. Op-Amp bertindak sebagai detektor dimana
Vnon inverting > Vinverting. Setelah itu arus dari op-amp akan dilanjutkan
ke R10 lalu masuk ke transistor Q6. Karena tegangan pada transistor >0,7
Volt maka transistor aktif. Arus dari suplay masuk ke kaki kolektor Q6 dan
keluar dari kaki emitter Q6. Transistor aktif maka relay juga aktif. Lalu
supplay dari relay akan diteruskan ke motor dan menyebabkan motor DC berputar
lalu diteruskan ke ground.
C. Video[kembali]
D. Download[kembali]
- Materi >> klik disini
- HTML >> klik disini
- Rangkaian >> klik disini
- Video >> klik disini
- Datasheet Sensor PIR >>
klik disini
- Datasheet Sensor Ultrasonik
>> klik disini
- Datasheet Relay >> klik disini
- Datasheet Resistor >>
klik disini
- Datasheet Diode 1N4001>> klik disini
- Datasheet Diode 1N6263W >> klik disini
- Datasheet Motor DC >>
klik disini
- Datasheet Transistor BC547
>> klik disini
- Datasheet Kapasitor >> klik disini
- Datasheet Op-Amp LM358
>> klik disini
- Library Sensor PIR >>
klik disini
- Library Sensor Ultrasonik
>> klik disini



{kind=link}
{kind=link}
Tidak ada komentar:
Posting Komentar